Tem interesse em fazer parte do grupo G-SEPi e ter a oportunidade de atuar em um grupo internacional de engenharia elétrica (IEEE PES)? ou conhece alguém que possa se interessar?
Então, é fundamental conhecer os meios para entrar no grupo: 1) Reuniões: O processo consiste em participar de 3 reuniões ordinárias seguidas do grupo, fazer uma apresentação sobre um conteúdo da área de Potência e participar da entrevista com os membros do grupo. 2) Processo Seletivo: Nesse processo, o candidato deve se inscrever no processo seletivo, fazer as avaliações propostas e participar da entrevista com os membros do grupo.
Ficou interessado(a)?
Então, participe de 3 reuniões ordinárias do grupo as quais ocorrem no Laboratório 58 da Escola Politécnica da UFBA (toda sexta-feira 9:00) ou inscreva-se no nosso processo seletivo através do link: https://forms.gle/ViUZZjgXfKjxTsGi6
O presente estudo de caso busca apresentar as etapas necessárias para a realização do controle de um conversor CC/CC através do uso de um controlador. Nesse caso, o processo será descrito através de softwares, como Matlab e Typhoon HIL.
O conversor Buck, o qual pode ser visto na figura 1, é caracterizado por ser um abaixador de tensão de modo que a sua tensão de saída é menor que a sua tensão de entrada.
Figura 1 – Conversor Buck
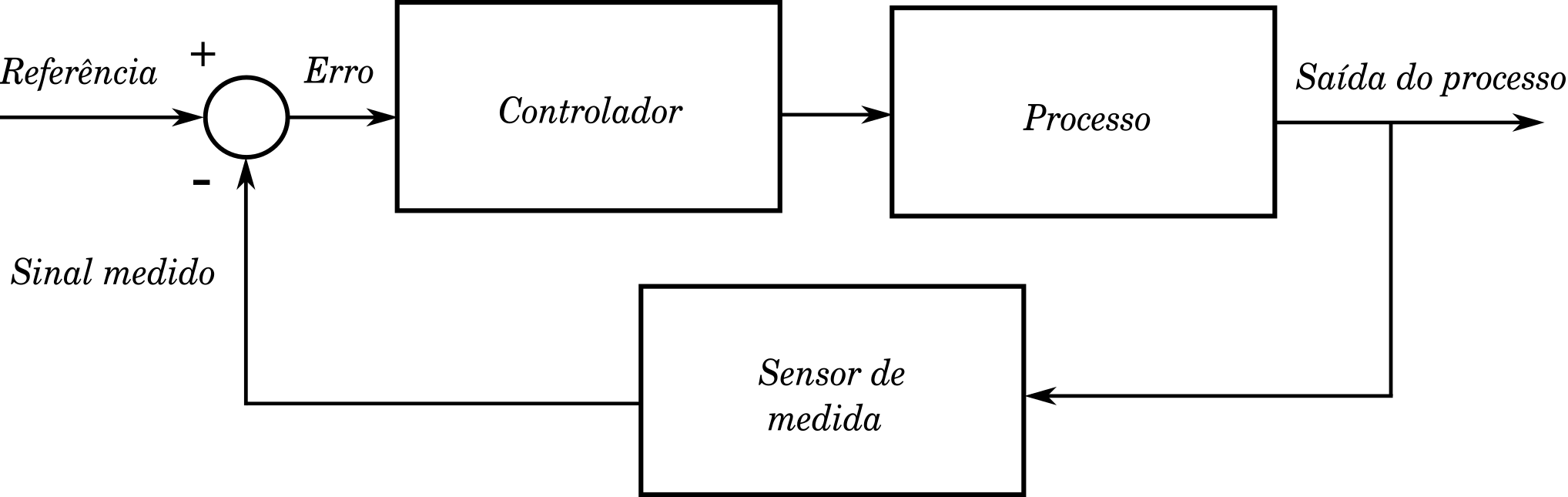
Enquanto isso, os controladores são utilizados em sistemas de malha fechada para controlar o valor de saída desse sistema. Com os devidos ajustes, é possível manter tal valor de forma estável e com erro mínimo. Para isso, deve ser feita a correta escolha para os parâmetros que compõem o referido controlador. Dessa maneira, o sistema deve apresentar um valor de referência de modo em que o controlador possa fazer o valor de saída se aproximar ao máximo desse valor. Ou seja, de forma a minimizar a variável de erro a qual consiste na diferença entre o valor de referência e o valor de saída atual, a representação de tal sistema de malha fechada com um controlador é mostrada na figura 2.
Figura 2 – Esquema de Sistema de Malha Fechada com Controlador
Neste desenvolvimento, será utilizado o controlador P no qual a letra P indica a ação proporcional promovida. Tal efeito é responsável pela promoção de uma resposta com maior velocidade sob variação do valor de referência. Esse controlador pode ser usado para o controle da tensão de saída do conversor ou até mesmo para o controle da corrente no indutor. Neste caso, será efetuado o controle para a tensão de saída do conversor Buck. Desse modo, o processo para se obter a simulação desejada é dado a partir das etapas apresentadas a seguir:
Modelagem do Conversor Buck
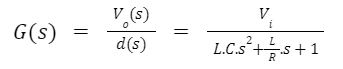
A primeira etapa consiste na obtenção da função de transferência do Conversor Buck através de sua respectiva modelagem. No caso do conversor Buck, tal função é conhecida, conforme mostrada na expressão abaixo, e pode ser usada diretamente. Porém, há sistemas em que a função de transferência do sistema é desconhecida e precisa ser obtida (fica como desafio ao leitor confirmar que a função de transferência desse conversor é válida a partir de sua modelagem). É importante ressaltar que a função de transferência se trata da relação entre a entrada e saída de um sistema, as quais são, no caso em questão, respectivamente tensão de saída do conversor Buck e duty cycle.
Obtenção dos Parâmetros do Controlador P
Após encontrar a função de transferência do sistema, faz-se uso do software de simulação MATLAB para se obter o parâmetro necessário para o controlador P (KP). O código para se definir a função de transferência do controlador P está dado a seguir:
Figura 3 – Código do MATLAB
Dessa forma, deve-se utilizar o recurso PID Tuner, presente nesse software. Tal ferramenta recebe como parâmetro a planta a ser controlada através de sua respectiva função de transferência, a qual foi obtida no item anterior. Com isso, é possível definir o tipo de controlador a ser projetado, as características do controle, entre outros. Após definir tais configurações, o parâmetro KP é obtido. As definições referentes ao controlador são mostradas a seguir:
Figura 4 – Características do Controlador
Desse modo, os resultados obtidos são os seguintes:
Figura 5 – Parâmetros do Controlador P
Figura 6 – Esquema de Sistema de Malha Fechada com Controlador
Ressalta-se que a oscilação em torno da amplitude que vale 1 na figura 6 é esperada e se deve ao fato do controlador escolhido ser do tipo P.
Montagem do Sistema de Malha Fechada
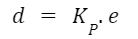
Com o parâmetro do controlador P, o código que realiza o controle já pode ser desenvolvido. Para isso, é importante ressaltar que a saída do controlador P (duty cycle) é dado pelo produto entre o parâmetro da ação proporcional e o erro, o qual consiste na diferença entre o valor esperado na saída do sistema e o valor atual:
Dessa maneira, o código, a ser aplicado no bloco de código em C do Typhoon HIL, é mostrado abaixo:
Figura 7 – Circuito do conversor Buck com Controlador P montado no software Typhoon HIL
Com isso, quando o código estiver configurado no bloco C function e o esquemático do circuito estiver montado conforme a imagem a seguir, a simulação pode ser executada.
Simulação do Sistema
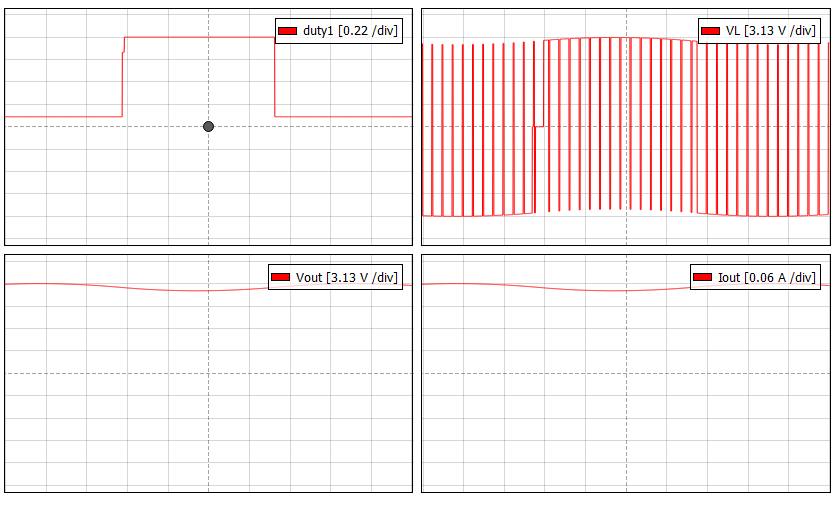
Na aba de simulação, denominada HIL Scada, é possível verificar os valores dos parâmetros presentes no sistema em tempo real. Se o arquivo de simulação disponibilizado for utilizado, nota-se que o circuito está reduzindo a tensão de entrada (24V) de modo que o valor de saída se aproxima do valor esperado (12V). É válido perceber ainda que, como o conversor buck é abaixador, a tensão de referência (valor esperado) não pode ser maior que o valor de entrada. Dessa forma, a sessão HIL Scada é apresentada abaixo, assim como o osciloscópio disponível pelo software para visualização dos sinais presentes no sistema:
Figura 8 – Simulação do conversor Buck com o controlador P no software Typhoon HIL
A Power & Energy Society (PES) é uma Sociedade Técnica do Instituto de Engenheiros Eletricistas e Eletrônicos (IEEE), focada nas áreas de Engenharia Elétrica e energia.
É com muita felicidade que anunciamos a diretoria 2022 do Capítulo Estudantil IEEE PES UFBA. Desejamos a nova diretoria boa sorte na gestão!
O Grupo de Sistemas Elétricos de Potência Integrado – G-SEPi declara aberto o seu Processo Seletivo, com o período de inscrições entre os dias 01/03 e 25/03.
Pré-requisitos
Ser estudante de Engenharia elétrica;
Ter cursado ou estar cursando a disciplina Análise de Circuitos II;
Disponibilidade de 20h semanais.
Obs: O estudante que for técnico em eletrotécnica está isento do segundo requisito e pode participar do processo em qualquer momento da graduação.
Análise do Controle volt-watt dos Inversores de Sistemas Fotovoltaicos nas Perdas Técnicas no Sistema de Distribuição de Energia Elétrica usando o Software OpenDSS
A apostila tutorial de ANAFAS (Análise de Faltas Simultâneas) é uma apostila destinada aos alunos que estão cursando ou iniciando os estudos na disciplina de Sistemas Elétricos de Potência.
O ANAFAS é um programa utilizado para cálculo de curtos-circuitos na rede elétrica e pode auxiliar os estudantes no entendimento do conteúdo relacionado com faltas em sistemas de potência. Desenvolvida pelos integrantes do projeto Pré-SEP, sob orientação do Professor Daniel Barbosa, a apostila aplica as funcionalidades do programa em um estudo de caso, conta com uma breve introdução teórica e comentários no passo a passo de toda a simulação.
A apostila está dividida com os seguintes conteúdos: 1 – Introdução; 2 – Montagem do circuito; 3 – Simulação das faltas.
No dia 23 de outubro de 2021, o Grupo de Sistemas Elétricos de Potência Integrados, em conjunto com o Laboratório de Eficiência Energética da UFBA, com o PELS/IAS UFCG e com a IEEE Power and Energy Society UFBA irão realizar o curso de Projeto e Dimensionamento de Sistemas Fotovoltaicos. O curso tem o intuito de preparar os profissionais e estudantes que irão trabalhar com de projetos de sistemas fotovoltaicos e, ao final, ocorrerá a emissão de certificados.
Cronograma
De 8:00 às 12:00 – Parte 01;
De 12:00 às 13:00 – Intervalo;
De 13:00 às 17:00 – Parte 02.
Ementa
Principais conceitos;
Referências técnicas e normativas;
Dimensionamentos;
Projetos on-grid e off-grid;
Conhecimentos em PVsyst;
Documentação técnica.
Sobre o ministrante
Leandro Carralero
Investimento
R$ 120,00 – Profissionais;
R$ 60,00 – Graduandos e pós-graduandos.
O curso será ministrado por Leandro Carralero o qual é graduado em Engenharia de Automação pela Universidade de Oriente em Cuba (2012). Atualmente, é mestre e doutorando em Engenharia Elétrica pela Universidade Federal da Bahia (UFBA). Além disso, leciona disciplinas de pós-graduação, relacionadas à energia solar fotovoltaica, nas universidades CIMATEC, UNIRUY e UNIJORGE.